Wireless Connectivity Takes Next-Generation Vehicles for a Ride
Vehicular connectivity has become a means for basic safety messaging and traffic management over the past 20 years, but now new sensors are equipping cars for an even better connected and safer driving experience.
| By Robert W. Heath Jr., Wireless Networking and Communications Group, Department of Electrical and Computer Engineering, University of Texas at Austin and Nuria González-Prelcic, Signal Processing and Communications Group, University of Vigo.
With wireless communication technology, applications support basic safety, transportation efficiency, and Internet access while vehicles communicate directly in Vehicle-to-Vehicle (V2V) mode or through the infrastructure in Vehicle-to-Infrastructure (V2I) mode (collectively called V2X). Connectivity is a natural complement to the increasing numbers of sensors that are integrated in automated vehicles.
Automated vehicles come in many flavors, depending on the automation level. One extreme is the driver in full control. At the other end, the vehicle is in complete control while the passenger has no means to take command. At levels in between, certain driving functions are automated, but the driver can still step in. For example, in a lower automation level, the driver may be warned about a potential forward collision. At a higher automation level, the car may automatically apply the brakes and take evasive action to avoid the collision. While there is a current trend to call fully automated driving ‘autonomous driving,’ it is unlikely that full automation can happen simultaneously with full autonomy, which implies no communication. Fully automated high-speed driving is difficult to achieve without (at a minimum) obtaining high-resolution map data via real-time updates from a map server.

Vehicular Sensing
Sensors deployed for automation include automotive radar, visual cameras, and Light Detection and Radar (LiDAR) systems. Radar is used for automatic cruise control, forward collision warnings, lane change assistance, parking, and pre-crash applications. Visual cameras are used for backup (in-reverse) safety, blind-spot monitoring, nap prevention, and lane keeping. LiDAR provides high-resolution 3D map information that can be used for autonomous navigation and pedestrian and bicycle detection.
These technologies are important for fully automated vehicles. For example, Tesla uses visual cameras for automated highway driving, while Google cars make heavy use of LiDAR and 3D map data for accurate driving and navigation, as well as several radar systems to aid in the detection of other vehicles. The range of each technology depends on its configuration and the deployment scenario. For example, in rural areas, the radar range is up to 200m, LiDAR’s range is 35m, and the range for visual cameras is 30m, but in urban areas, the range diminishes to a few meters due to heavy traffic and other obstructions. Essentially, these external sensors are limited by what they can see. Communication may allow vehicles to expand their sensing range by leveraging what can be seen by other vehicles in the front, back, or sides.
The data that should be exchanged between automated vehicles is not yet determined. If only low data rates are available, it makes sense that vehicles communicate only heavily processed data. For example, a vehicle using its sensors may detect the presence of a bicycle and then broadcast the position and velocity of that bicycle to other vehicles. Alternatively, if high-data-rate communication is available, the vehicle may broadcast less processed or raw sensor information, allowing other cars to perform their own sensor fusion and processing. This method allows vehicles to make their own decisions, reducing the reliance on decisions made from other vehicles. An added advantage is that this approach scales as the processing capabilities of vehicles improve over time. Having high-data-rate and low-latency communication allows the exchange of processed and raw information. Table 1 shows the required data rate to transmit raw data generated from different types of automotive sensors.

Table 1: Summary of Automotive Sensors and Associated Data Rates
State-of-the-Art Vehicular Communication
Dedicated Short Range Communication (DSRC) technology is primarily a means for exchanging basic safety messages and offers some applications in traffic management. DSRC supports both V2V and V2I. After nearly two decades in development, DSRC is now available in some U.S. cars; however, a government mandate is required for wider use. The data rates supported by DSRC are quite low — on the order of a few megabits per second. DSRC does not support the exchange of raw sensor data, which may be required by automated vehicles.
Cellular communication is another means for vehicles to communicate, either directly using Device-to-Device (D2D) or through the cellular infrastructure at the 850 MHz, 1,800 MHz, or 2,100 MHz bands. Through D2D mode in Long-Term Evolution-Advanced (LTE-A), the Base Station (BS) helps devices discover and communicate directly. The rates supported through D2D in LTE-A are limited due to the inaccurate channel state information, which is a problem in mobile settings. Fourth-Generation (4G) cellular communication is possible using this technology through the infrastructure, but data rates are merely several megabits per second in medium and high mobility. Table 2 shows the features of DSRC versus LTE-A for V2V/V2I communications. Considering that autonomous vehicles generate up to 1 TB per hour of driving, neither 4G cellular communication nor DSRC provides enough capability for connecting vehicles that want to exchange sensor data.
Connected-and-Automated Vehicles (CAVs) are a subject of huge interest. Currently, tests validate the advantages to combining connectivity and automation:
- Expanding vehicle sensing range, overcoming range limitations of existing sensors
- Supporting interactions between vehicles with different automation levels sharing planned trajectories so future decisions and actions are optimized
- More informed safety decisions and higher levels of traffic coordination and fuel efficiency
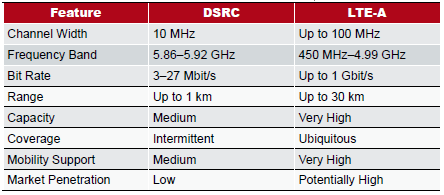
Table 2: Comparison of Different Features of DSRC and LTE-A in D2D Mode for Vehicular Communications
Sensing Challenges
At present, there is tremendous interest in the automotive use case for 5G. Applications include vehicular automation, transportation planning and operations, and infotainment. 5G will support 10x lower latencies and 10x higher bandwidths than 4G solutions, making it especially suitable for automotive applications. In particular, millimeter Wave (mmWave) 5G is attractive because of very high data rates, which can be used for exchanging raw sensor data. Moreover, high-data-rate infotainment applications and joint communication and radar are possible at millimeter wave frequencies.
In mmWave links, vehicles and pedestrians may block the primary communication path, while static objects in the environment, such as trees and buildings, are another source of blockage. Assuming that the BS is equipped with different sensors, such as radar and cameras, a combination of sensing and Machine Learning (ML) detects potential obstacles and their associated mobility to help configure the communication link and improve V2I communication performance. The ML algorithm exploits past communication performance to classify particular radar responses as blockages, for example. Combined with the map of the static environment, this information is used to develop an algorithm to predict different types of blockages that a target vehicle experiences during travel. The results of the blockage prediction algorithm redefine the new beams that have to be used at the infrastructure side to illuminate the vehicle. The combination of sensing and ML can also be leveraged at the transportation operations centers to discover more about the transportation environment and improve services related to traffic signaling and planning.
Precise localization is another critical aspect for autonomous or automated vehicle navigation. Standard GPS/GNSS receivers exhibit accurate 2- to 3-meter positioning under good multipath conditions, but autonomous/automated vehicles need a more precise positioning technology. Centimeter, or at least decimeter, accuracy is desired to guarantee that a vehicle keeps the security distance from other vehicles and stays in its lane. High-precision positioning, however, is challenging to navigate urban environments effectively due to the so-called ‘urban canyon’ effect between tall buildings. Although, precise receivers are available, the required GPS sensors are very expensive. One approach to overcoming these challenges consists of exploiting information obtained from other sensors in the vehicle or at the road infrastructure to correct the standard GPS-estimation and enable real-time, centimeter-accurate positioning.
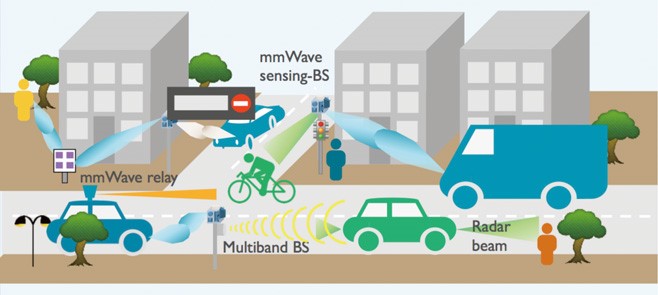
Mixed-use environments, where vehicles comprise different levels of automation and communication, remain a challenge. One method is to deploy sensors at the BS and then the information derived from the sensors can be broadcast to connected vehicles, providing situational awareness about non-connected vehicles and non-vehicular users of roadways. The infrastructure-based approach works well even if most other vehicles do not have communication capabilities. Infrastructure also makes higher levels of automation more effective to coordinate interactions of vehicles through intersections without the need for traffic lights. This infrastructure-based sensing, as shown in Figure 1, will likely be built around 5G cellular communications since the aim is to provide much higher data rates. Figure 1 shows our vision of cellular infrastructure supporting transportation at mmWave. It is a combination of sensing, learning, and communication, where vehicles exchange sensor data.

Figure 1: Vision of Cellular Infrastructure Supporting Transportation
Initiative SAVES
The University of Texas (UT) at Austin has created a new strategic research initiative within the school’s Wireless Networking and Communications Group called SAVES to tackle the challenges related to next-generation connected vehicles. SAVES provides a common framework for the development of advanced vehicle connectivity, infrastructure to support connectivity, technologies for sensing, including imaging, radar and location, and applications of connectivity.
SAVES brings together companies working in communications and vehicular spaces with faculty and students who specialize in wireless communications, ML, and transportation. The SAVES effort also leverages ongoing collaboration with the U.S. Department of Transportation (DOT) through Data-Supported Transportation Operations and Planning (DSTOP) and numerous projects funded by the Texas DOT. A unique feature of SAVES is its emphasis on both wireless performance metrics, such as data rates, and transportation metrics, such as traffic efficiency and safety, when developing new technologies.
Current work being developed at UT SAVES includes basic theory, algorithms, and experimental activities. One research direction aims to establish the fundamentals of sensor-aided communication and apply these fundamentals to beam training in mmWave V2X communication by leveraging data extracted from the many sensors available on cars. These include radar-aided mmWave vehicular communication and the use of position information to reduce beam alignment overhead.
Another research direction is the development of the basic theory for mmWave vehicular communications. The investigation of the optimum beamwidth and the definition of the coherence time for beam alignment are good examples of the projects already developed.
Several current and evolving experimental activities are making extensive use of National Instruments equipment that includes millimeter-wave prototyping and radar testing and measurement tools. Channel measurements — taken in collaboration with the Toyota Info Technology Center and National Instruments — are being conducted to better understand the mmWave vehicular environment. A hybrid mmWave prototype MIMO system with two RF chains providing 1-GHz bandwidth is being developed in a collaboration between UT, the University of Vigo (Spain), and National Instruments. The goal is to test our hybrid precoding and channel estimation algorithms in simple vehicular scenarios. A joint mmWave communication and radar prototype is also being developed based on National Instruments hardware; it leverages the waveform and the typical receiver algorithms of the IEEE 802.11ad WLAN standard to enable a joint framework of vehicular communication and radar technologies at 60 GHz. A similar effort is being conducted at lower frequencies to show how IEEE 802.11p could also be used for radar. Finally, there is ongoing research into data fusion based on experimental data; for example, combining DSRC and radar for improved forward collision warnings between connected and unconnected vehicles.
Conclusions
5G and mmWave communications will equip the next-generation of automated cars with more and more sensors. High-data-rate connectivity is critical to vehicles for exchanging sensor data, enlarging their sensing range, and making better safety-related decisions. Sensing is an important differentiating feature of vehicular systems, and sensing data can be leveraged not only to increase safety or traffic coordination levels but to aid communication itself, helping establish mmWave links with low overhead. Infrastructure becomes not just a means of communication but also a sensing and data collection platform. This data will be useful for real-time operations, transportation network control, planning, and operations. Many research challenges still need to be tackled, however, to implement our 5G automotive vision, including the development of the fundamentals of mmWave vehicular communications and sensor-aided communications.